Abstract
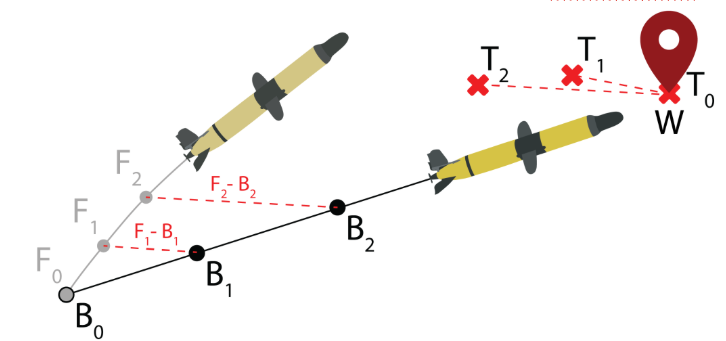
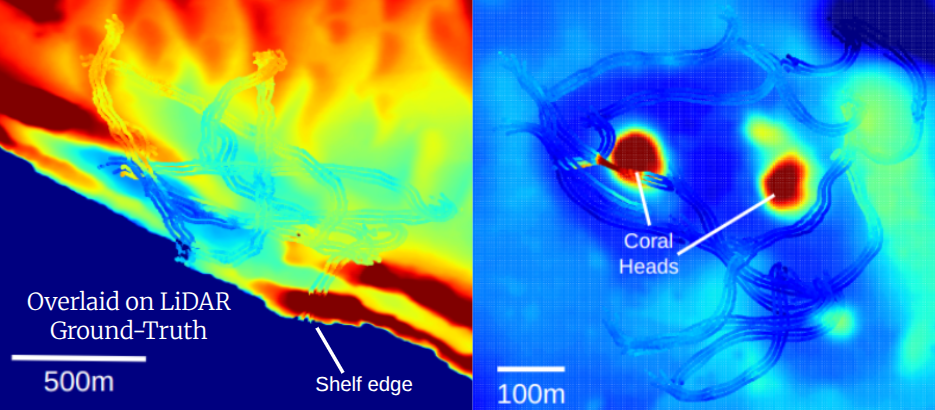
Georeferenced subsurface survey is primarily conducted by autonomous underwater vehicles and remotely operated vehicles that require power-intensive navigation suites, acoustic beacons, and surface support vessels with attendant operations teams onboard. The significant infrastructure required to operate vehicles conducting surveys in remote regions (e.g., under ice) poses increased challenges and remains prohibitively costly, leading to sparse coverage. Unattended operations using autonomous underwater gliders (AUGs) with low power, high-resolution onboard navigation holds promise in scaling up coverage while significantly reducing the operational costs of georeferenced surveys. In this work, we present a modified AUG equipped with a low power embedded navigation process and results of unattended sonar acoustic surveys using this experimental platform.
[1] (PDF) Phung, A., Billings, G., Burgess, G., & Camilli, R. (2025). An autonomous underwater glider with improved onboard navigation for unattended mapping. IEEE Journal of Oceanic Engineering.
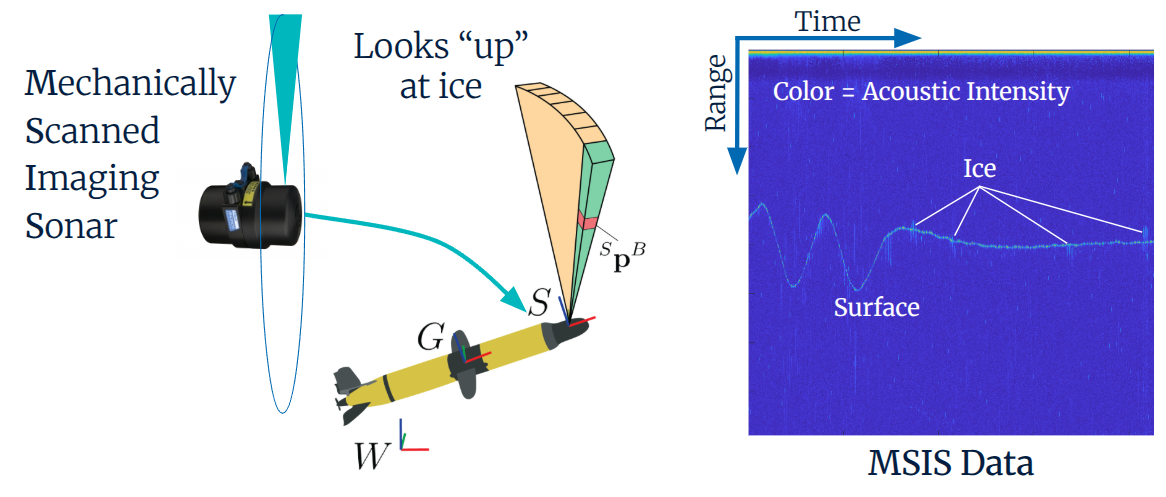
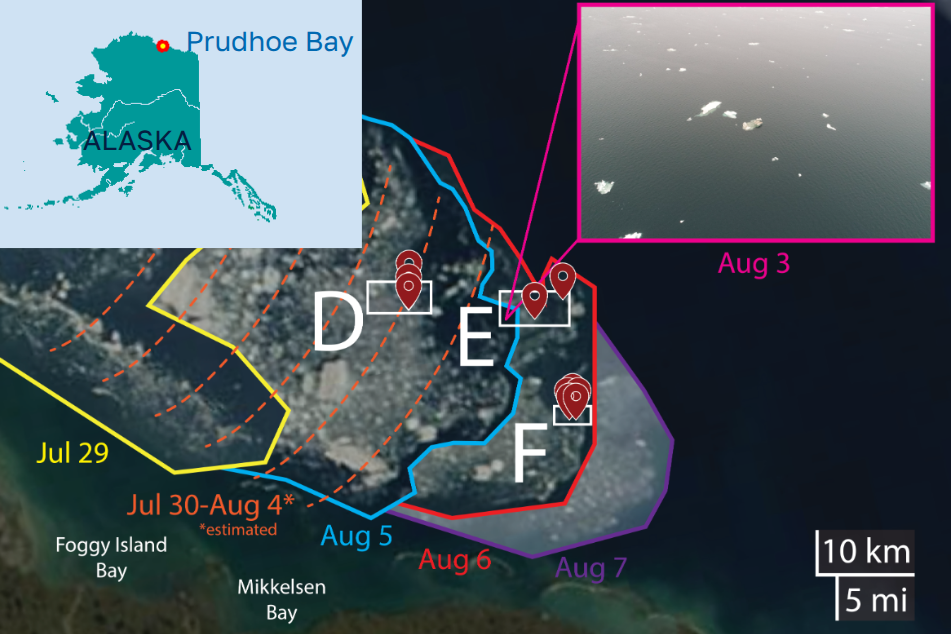
[2] (PDF) Phung, A., Billings, G., Maksym, T., & Camilli, R. (2025, June). Automated Ice Detection for Autonomous Underwater Gliders. In OCEANS 2025 Brest (pp. 1-5). IEEE.
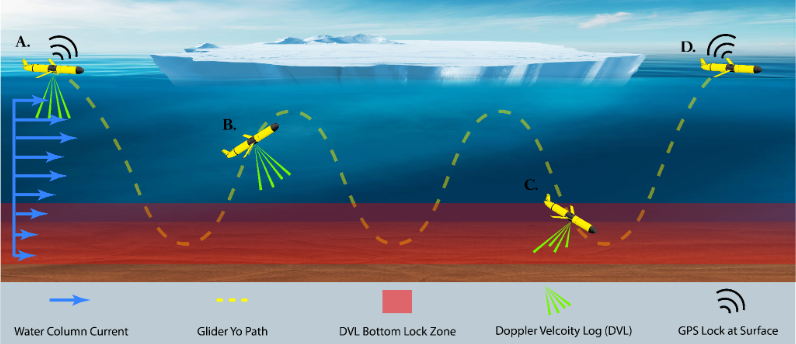
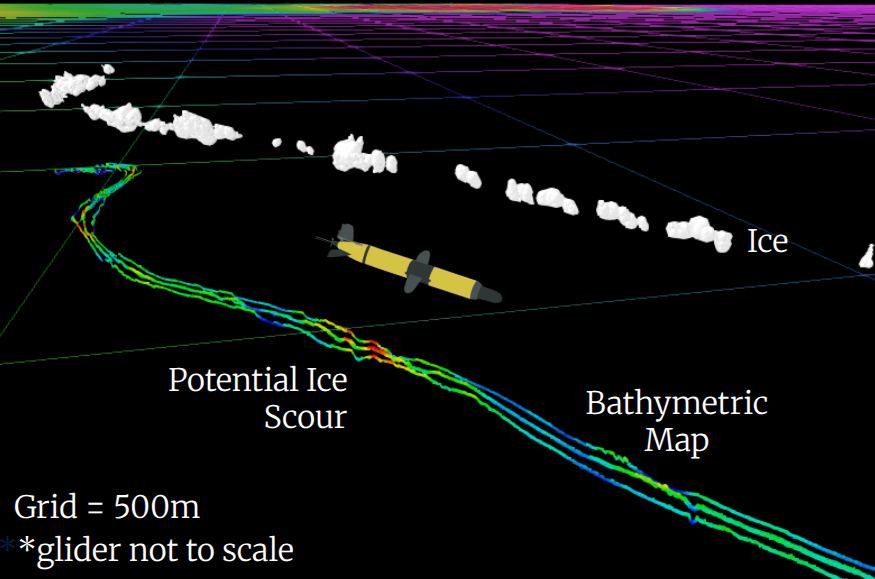
[3] (PDF) Billings, G., Phung, A., & Camilli, R. (2025, June). DVL Integration with Autonomous Underwater Gliders for Navigation in Arctic Marginal Ice Zones. In OCEANS 2025 Brest (pp. 1-6). IEEE.
[4] (PDF) Billings, G., Phung, A., & Camilli, R. (2023, October). DVL-based odometry for autonomous underwater gliders. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9910-9917). IEEE.